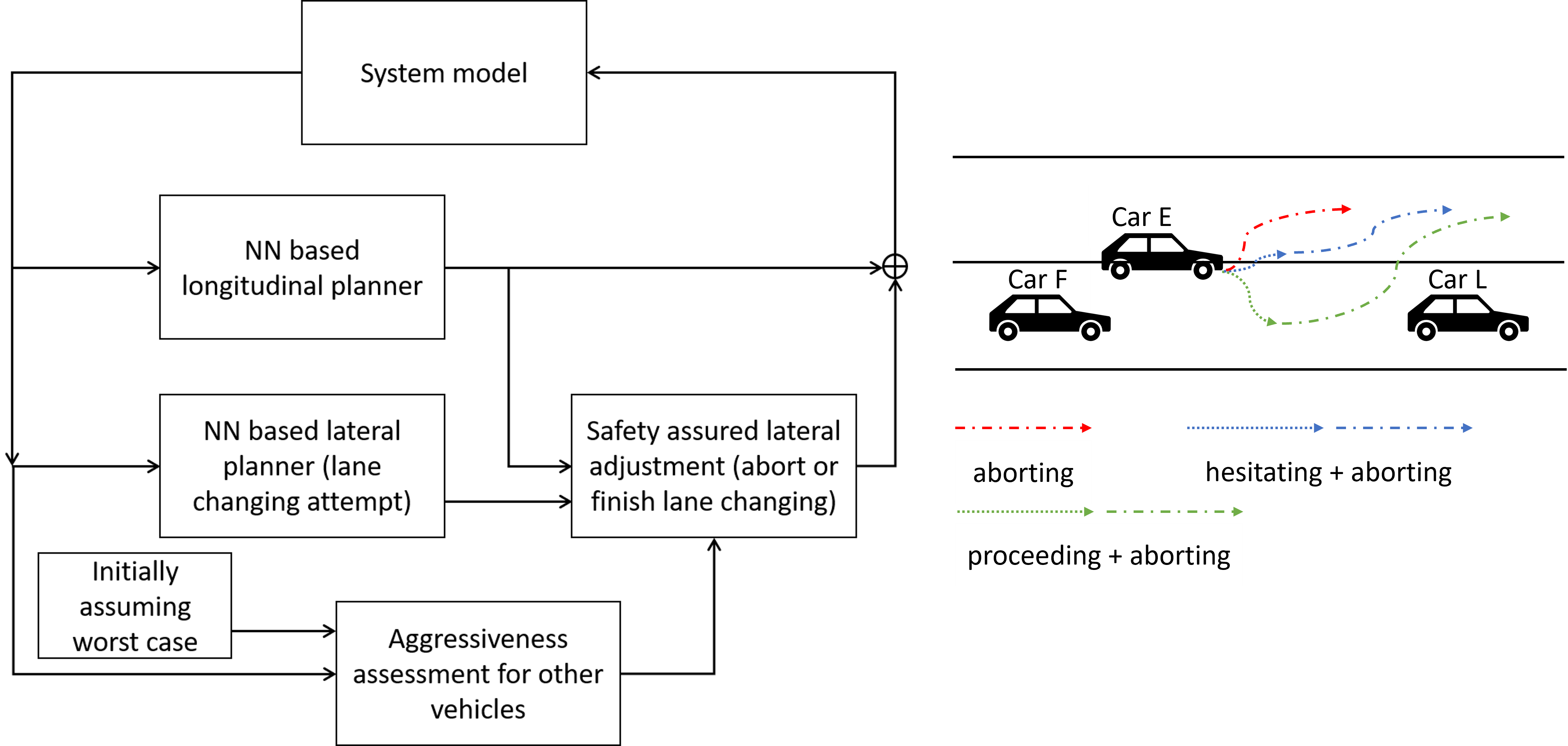
When the traffic stream is extremely congested, the mandatory lane changing can be significantly difficult. In this work, we propose a neural network based interactive trajectory planner, which will firstly attempt to change lanes as long as safety is ensured. We peform the safety analysis based on aggressiveness assessment for surrounding vehicles in real time. When it is unsafe to proceed to change lane, the ego vehicle can hesitate around current lateral position or directly go back to the original lane.
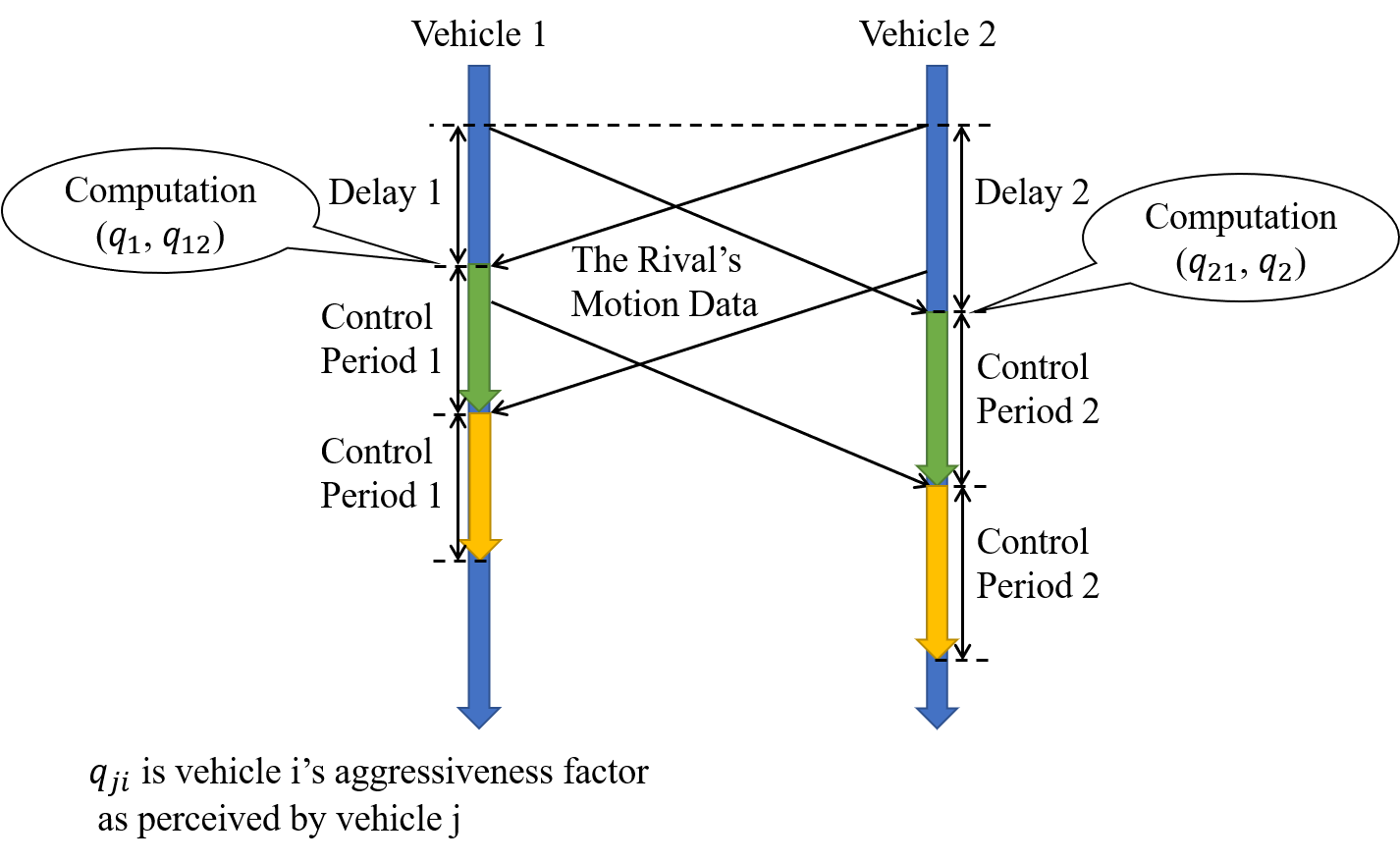
Autonomous vehicles (AVs) are expected to be an integral part of the next generation of transportation systems, where they will share the transportation network with human-driven vehicles during the transition period. In this work, we model the interactions between vehicles (two AVs or an AV and a human-driven vehicle) in a lane changing process by leveraging the Stackelberg game. We explicitly model driving attitudes for both vehicles involved in lane changing. We design five cases, in which the two vehicles have different levels of knowledge, and make different assumptions, about the driving attitude of the rival. We conduct theoretical analysis and simulations for different cases in two lane changing scenarios, namely changing lanes from a higher-speed lane to a lower-speed lane, and from a lower-speed lane to a higher-speed lane. We use four metrics (fuel consumption, discomfort, minimum distance gap and lane change success rate) to investigate how the performance of a single vehicle and that of the system will be influenced by the level of information sharing, and whether a vehicle trajectory optimized based on selfish criteria can provide system-level benefits.
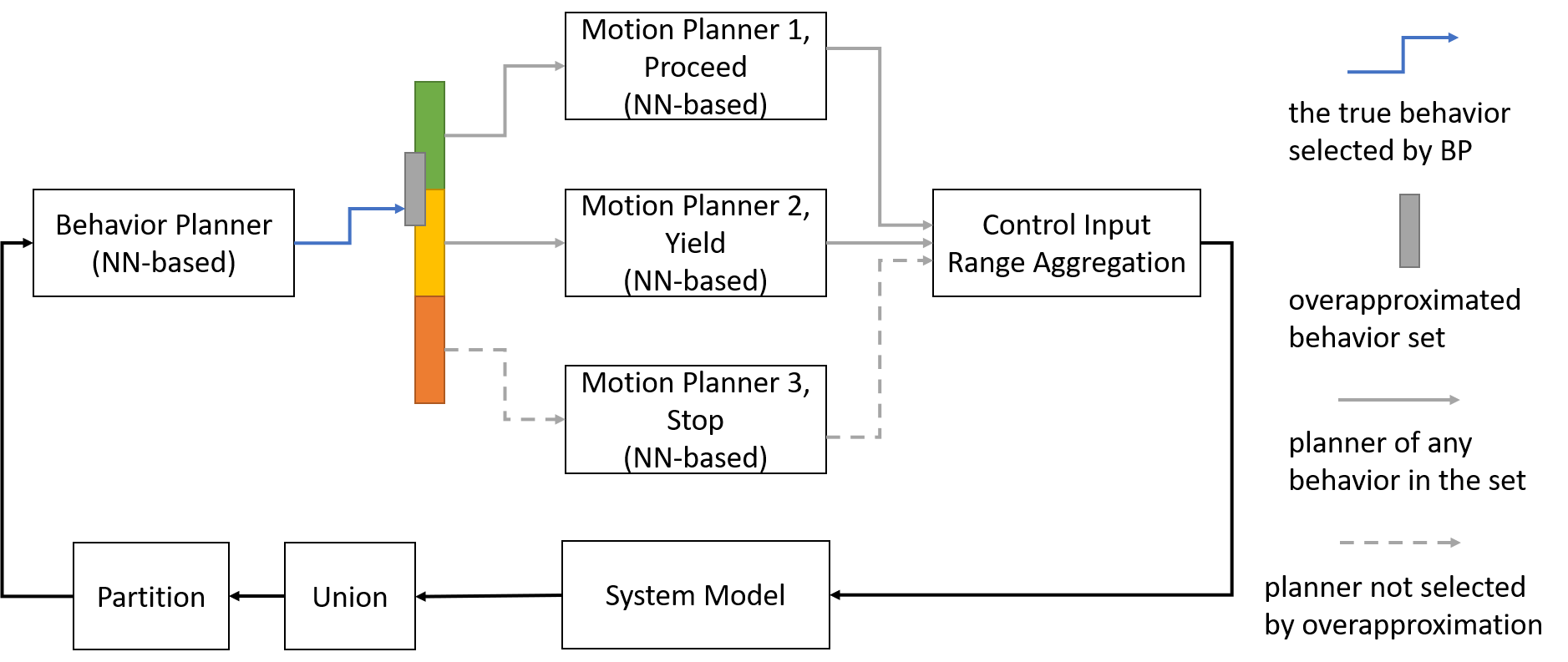
Neural networks have shown great promises in planning, control, and general decision making for learning-enabled cyber-physical systems (LE-CPSs), especially in improving performance under complex scenarios. However, it is very challenging to formally analyze the behavior of neural network based planners for ensuring system safety, which significantly impedes their applications in safety-critical domains such as autonomous driving. In this work, we propose a hierarchical neural network based planner that analyzes the underlying physical scenarios of the system and learns a system-level behavior planning scheme with multiple scenario-specific motion-planning strategies. We then develop an efficient verification method that incorporates overapproximation of the system state reachable set and novel partition and union techniques for formally ensuring system safety under our physics-aware planner. With theoretical analysis, we show that considering the different physical scenarios and building a hierarchical planner based on such analysis may improve system safety and verifiability. We also empirically demonstrate the effectiveness of our approach and its advantage over other baselines in practical case studies of unprotected left turn and highway merging, two common challenging safety-critical tasks in autonomous driving.
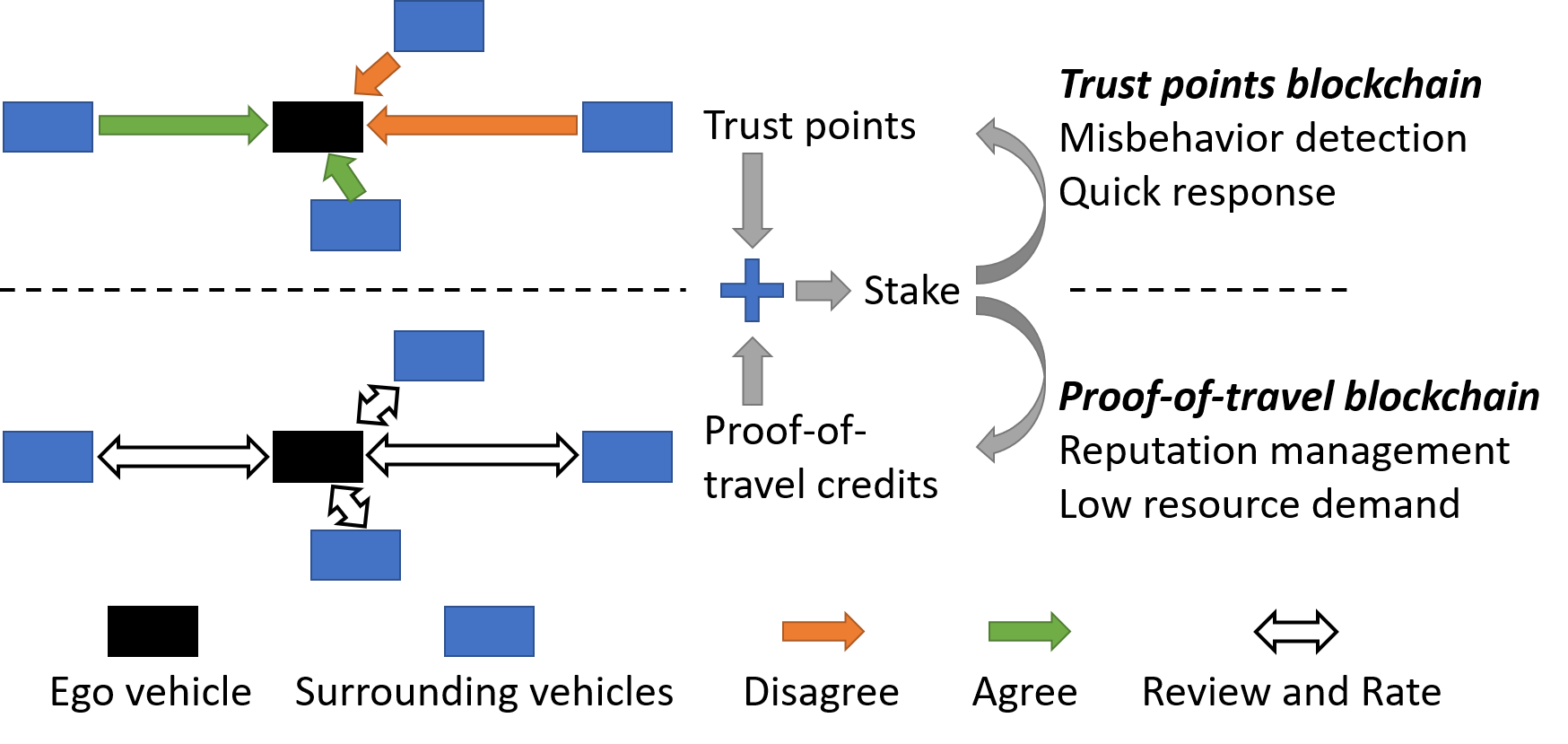
While connected vehicle (CV) applications have the potential to revolutionize traditional transportation system, cyber and physical attacks on them may lead to disastrous consequences. In this work, we propose an efficient dual cyber-physical blockchain framework to build trust and secure communication for CV applications. Our approach incorporates blockchain technology and physical sensing capabilities of vehicles to quickly react to attacks in a large-scale vehicular network, with low resource overhead. We explore the application of our framework to three CV applications, i.e., highway merging, intelligent intersection management, and traffic network with route choices. Simulation results demonstrate the effectiveness of our blockchain-based framework in defending against spoofing attacks, bad mouthing attacks, and Sybil and voting attacks. We also provide analysis to show the timing and resource efficiency of our framework.
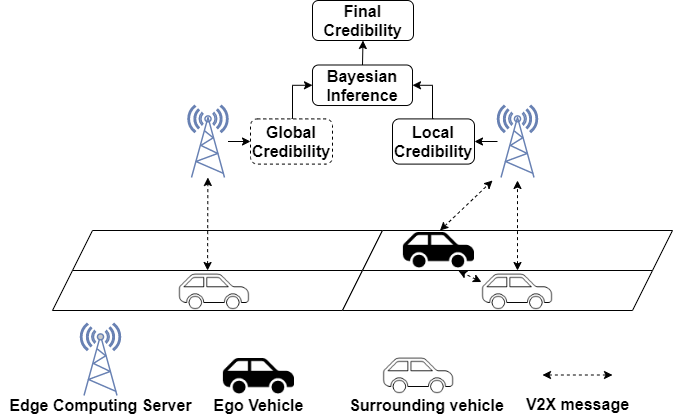
The emerging vehicular edge computing (VEC) technology has the potential to bring revolutionary development to vehicular ad hoc network (VANET). However, the edge computing servers (ECSs) are subjected to a variety of security threats. One of the most dangerous types of security attacks is the Sybil attack, which can create fabricated virtual vehicles (called Sybil vehicles) to significantly overload ECSs' limited computation resources and thus disrupt legitimate vehicles' edge computing applications. In this paper, we present a novel Sybil attack detection system on ECSs that is based on the design of a credibility enhanced temporal graph convolutional network. Our approach can identify the malicious vehicles in a dynamic traffic environment while preserving the legitimate vehicles' privacy, particularly their local position information. We evaluate our proposed approach in the SUMO simulator. The results demonstrate that our proposed detection system can accurately identify most Sybil vehicles while maintaining a low error rate.